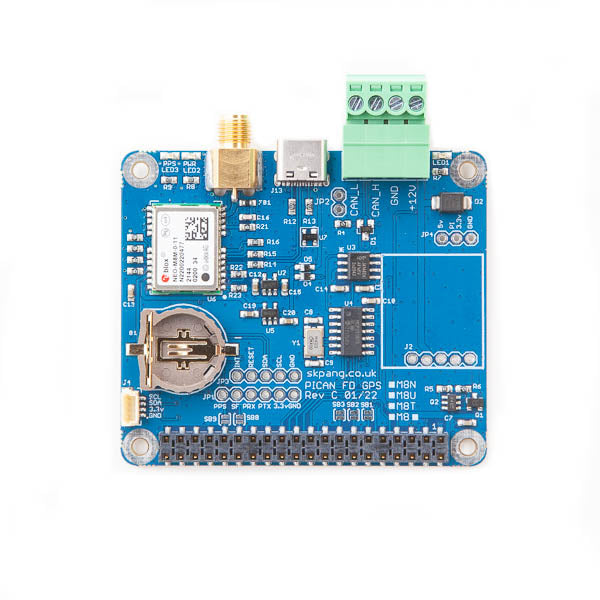




PiCAN FD with GPS/GNSS ublox NEO-M8U Untethered Dead Reckoning with 3D sensors for Raspberry Pi
The strength of UDR is particularly apparent under poor signal conditions, where it brings continuous positioning in urban environments, even to devices with antennas installed within the vehicle. Useful positioning performance is also available during complete signal loss, for example in parking garages and short tunnels. With UDR, positioning starts as soon as power is applied to the module, before the first GNSS fix is available.
The NEO-M8U may be installed in any position within the vehicle without configuration. In addition to its freedom from any electrical connection to the vehicle, the on-board accelerometer and gyroscope sensors result in a fully self-contained solution, perfect for rapid product development with reliable and consistent performance.
- Microchip MCP2518FD CAN Controller
- Arbitration Bit Rate u pto 1Mbps
- Data Bit Rate upto 8Mbps
- CAN FD Controller modes
- Mixed CAN 2.0B and CANFD mode
- CAN 2.0B mode
- High speed SPI Interface (10 MHz)
- 120Ω terminator ready
- LED indicator (GPIO04)
- Four fixing holes, comply with Pi Hat standard
- SocketCAN driver, appears as can0 to application
- Interrupt RX on GPIO25
- Fix status LED
NEO-M8U Features
- 72-channel u-blox M8 engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 SBAS L1 C/A: WAAS, EGNOS, MSAS Galileo-ready E1B/C
- USB-C, I2C and UART communication
- SMA antenna connection
- u-center software compatible. Requires Windows PC via USB-C
- Time Pulse LED
The UDR feature of the NEO-M8U is suitable only on motor vehicle and motor bike.
u-blox’s proprietary untethered dead reckoning (UDR) solution uses an inertial measurement unit (IMU) included within the module. IMU data and GNSS signals are processed together, achieving accurate and continuous positioning in GNSS-hostile environments (for example, urban canyons) and useful positioning even in case of complete GNSS signal absence (for example, tunnels and parking garages).
The NEO-M8U combines GNSS and IMU measurements and calculates position solutions at rates of up to 2 Hz. These solutions are reported in standard NMEA, UBX-NAV-PVT and related messages. A new High navigation rate output message (UBX-HNR-PVT) extends these results with IMU-only data to deliver accurate, low-latency position solutions at rates of up to 30 Hz.
Dead reckoning allows navigation to commence as soon as power is applied to the module (that is, before a GNSS fix has been established) and given all of the following conditions:
• The vehicle has not been moved without power applied to the module.
• At least a dead-reckoning fix was available when the vehicle was last used.
• A back-up supply has been available for the module since the vehicle was last used.
☞ The save-on-shutdown feature can be used in case no back-up supply is available. All information necessary will be saved to flash and read from the flash upon restart. For more details, see the u- blox 8 / u-blox M8 Receiver Description / Protocol Specification [2].
For post-processing applications sensor data is available from messages UBX-ESF-MEAS and UBX- ESF-RAW (high rate). Each message includes the time of measurement.
- Schematic
- User guide
- NEO-M8U summary
- NEO-M8U datasheet
- u-blox Protocol Specification
- u-blox UDR white paper
- u-blox u-center software downlaod