PiCAN with GPS + Gyro +Accelerometer CAN-Bus for Raspberry Pi - Retired Product
Sold out
£0.00
inc VAT
Original price
£0.00
-
Original price
£0.00
Original price
£0.00
£0.00
-
£0.00
Current price
£0.00
ex VAT
SKU RSP-PICANGPSACC
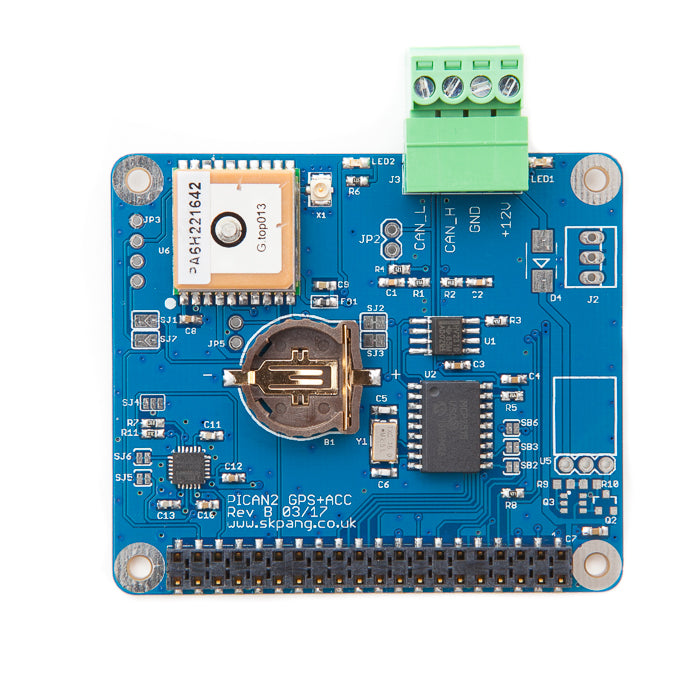
This PiCAN GPS board provides CAN-Bus capability for the Raspberry Pi 2 and 3. It uses the Microchip MCP2515 CAN controller. CAN connections are made via 4 way screw terminal plug. GPS is provided by a 66 channels MTK3339 chipset module. An onboard battery holder for a CR1220 cell. The backup power is for the real time clock and help to reduce fix time. The GPS module has built in patch antenna but an external active antenna can also be use via the uFL connector.
The MPU-6050 provides six axis gyro and accelerometer with an onboard Digital Motion ProcessorTM (DMPTM) capable of processing complex 9-axis MotionFusion algorithms, the MPU-6050 does away with the cross-axis alignment problems that can creep up on discrete parts.
Easy to install SocketCAN driver. Programming can be done in C or Python.
This board is now retired.
Replacement board:
Features
- CAN v2.0B at 1 Mb/s
- High speed SPI Interface (10 MHz)
- Standard and extended data and remote frames
- CAN connection via screw terminal
- 120Ω terminator ready
- Serial LCD ready
- LED indicator
- Four fixing holes, comply with Pi Hat standard
- SocketCAN driver, appears as can0 to application
- Interrupt RX on GPIO25
- MTK3339 chipset
- -165 dBm sensitivity, 10 Hz updates, 66 channels
- RTC battery holder
- Fix status LED
- On board patch antenna
- uFL connector for external active antenna
- I2C Digital-output of 6 or 9-axis MotionFusion data in rotation matrix, quaternion, Euler Angle, or raw data format
- Input Voltage: 2.3 - 3.4V
- Selectable Solder Jumpers on CLK, FSYNC and AD0
- Tri-Axis angular rate sensor (gyro) with a sensitivity up to 131 LSBs/dps and a full-scale range of ±250, ±500, ±1000, and ±2000dps
- Tri-Axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
- Digital Motion ProcessingTM (DMPTM) engine offloads complex MotionFusion, sensor timing synchronization and gesture detection
- Embedded algorithms for run-time bias and compass calibration. No user intervention required
Optional Items
- External GPS antenna
- uFL to SMA cable
- CR1225 cell
Documents
- Schematic Rev B
- User and installation guide
- Writing your own CAN program in C
- Writing your own CAN program in Python
- Python3 examples in Github
- MPU-6050 examples
Distributors
- Europe
The SMPS version is not suitable for Raspberry Pi 4 Model B.